Design and Analysis of a Spherical Joint Mechanism for Robotic Manipulators
Por um escritor misterioso
Last updated 03 junho 2024

Robotic Arm Design: Types & Components of Robotic Arms

Design and kinematic analysis of a 3-RRR spherical parallel manipulator reconfigured with four–bar linkages - ScienceDirect

Kinematic analysis and optimal design of a novel 3-PRR spherical parallel manipulator - Soheil Zarkandi, 2021

What are manipulator robots? Understanding their Design, Types, and Applications

Proposal of paper format for IFToMM World Congress
Geometry and kinematics for a spherical-base integrated parallel mechanism – topic of research paper in Mechanical engineering. Download scholarly article PDF and read for free on CyberLeninka open science hub.

Kinematics Analysis of 6-DoF Articulated Robot with Spherical Wrist
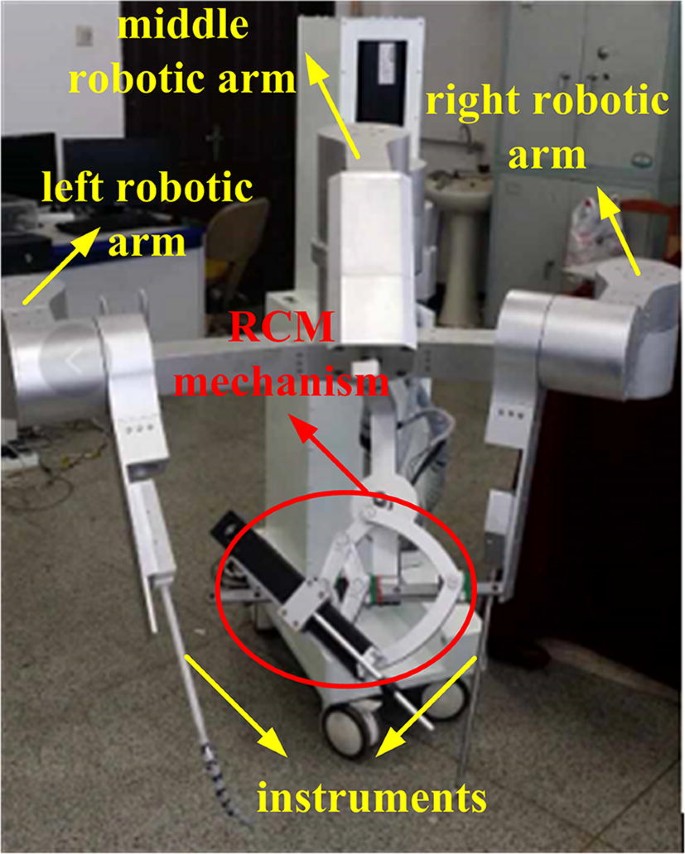
New remote centre of motion mechanism for robot-assisted minimally invasive surgery, BioMedical Engineering OnLine

Chapter 2
Frontiers On Aerial Robots with Grasping and Perching Capabilities: A Comprehensive Review

Mechanism design and kinematic analysis of a robotic manipulator driven by joints with two degrees of freedom (DOF)

The inverse kinematics of a 7R 6-degree-of-freedom robot with non-spherical wrist - Xuhao Wang, Dawei Zhang, Chen Zhao, 2017
Robot Singularities: What Are They and How to Beat Them - RoboDK blog

Design and performance analysis of a 3-RRR spherical parallel manipulator for hip exoskeleton applications - Soheil Sadeqi, Shaun P Bourgeois, Edward J Park, Siamak Arzanpour, 2017

Design and Prototyping of a Spherical Parallel Machine Based on 3-CPU Kinematics
Recomendado para você
-
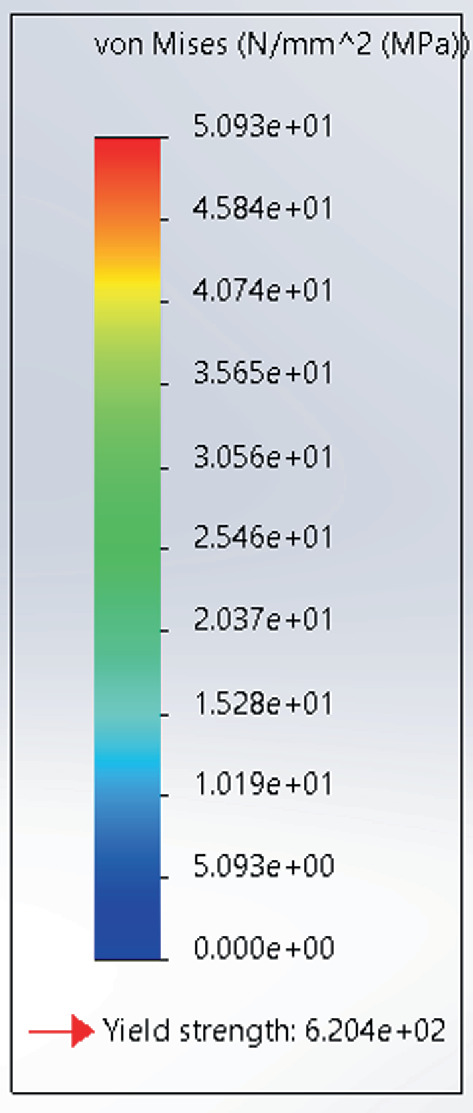
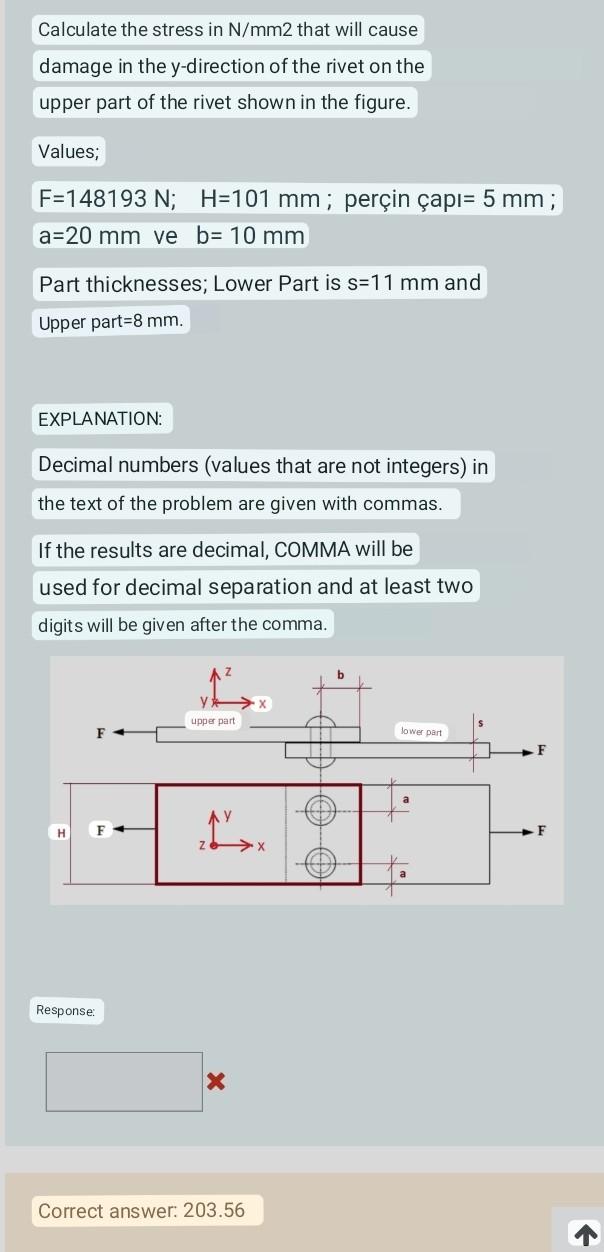
Solved Calculate the stress in N/mm2 that will cause damage03 junho 2024
-
 I get error message as **ERROR: E VALUE ENTERED IS 204999.984375 N/MM2. - RAM, STAAD Forum - RAM, STAAD03 junho 2024
I get error message as **ERROR: E VALUE ENTERED IS 204999.984375 N/MM2. - RAM, STAAD Forum - RAM, STAAD03 junho 2024 -
![PDF] Full-Range Stress–Strain Curves for Aluminum Alloys](https://d3i71xaburhd42.cloudfront.net/387878655d07c55f809ded7bd8167743a3077065/26-Figure15-1.png) PDF] Full-Range Stress–Strain Curves for Aluminum Alloys03 junho 2024
PDF] Full-Range Stress–Strain Curves for Aluminum Alloys03 junho 2024 -
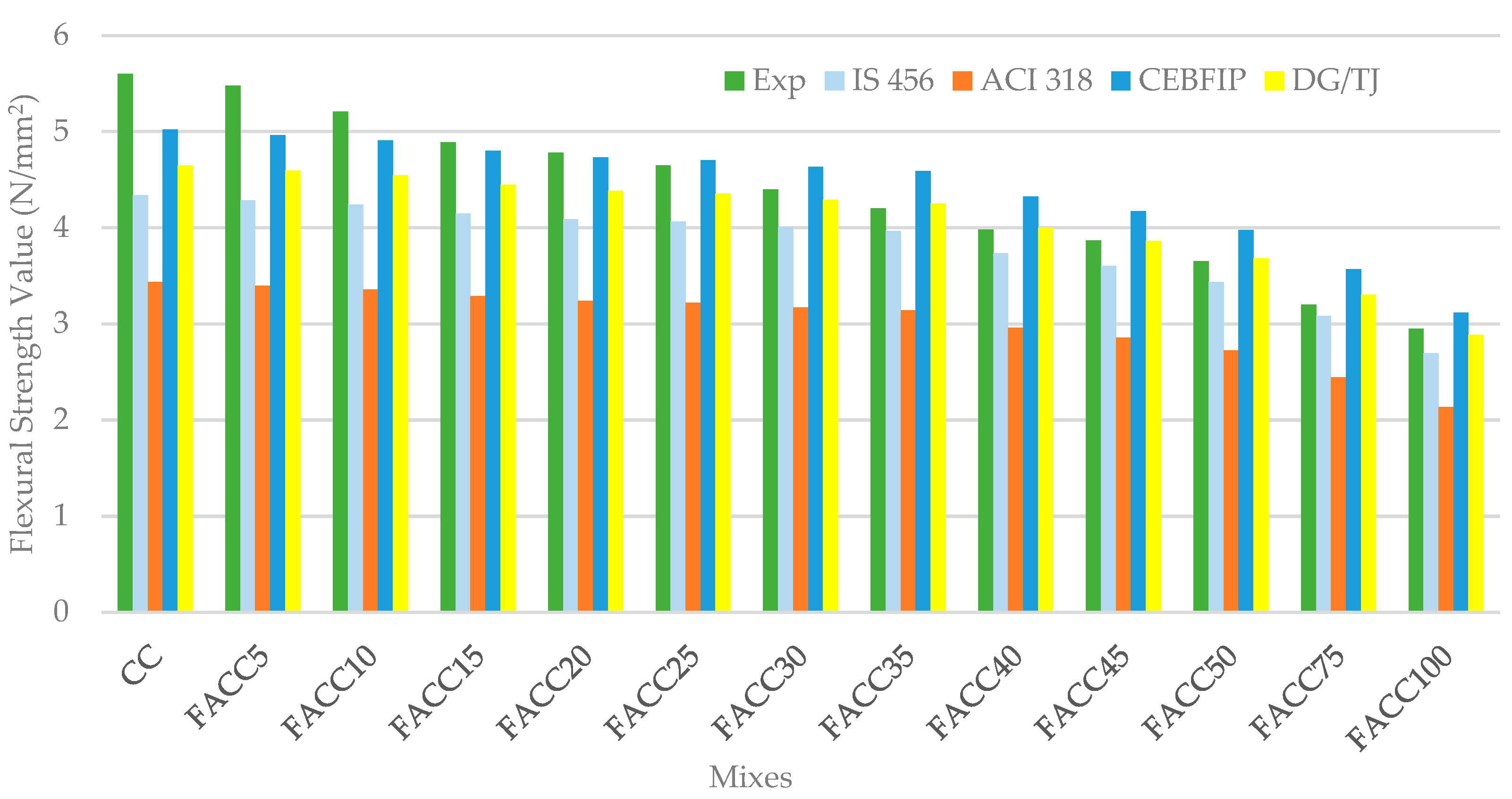 Buildings, Free Full-Text03 junho 2024
Buildings, Free Full-Text03 junho 2024 -
 Rock Rebound Hammer NDT Test 50-194 N/mm2 Compressive Strength Tester03 junho 2024
Rock Rebound Hammer NDT Test 50-194 N/mm2 Compressive Strength Tester03 junho 2024 -
Compressive strength of concrete is 28.9 N/mm2 after 56 days. Is this acceptable? - Quora03 junho 2024
-
 At a point in a material there are normal stress of 30N/mm2 and 60N/mm2 tensile,together with a.03 junho 2024
At a point in a material there are normal stress of 30N/mm2 and 60N/mm2 tensile,together with a.03 junho 2024 -
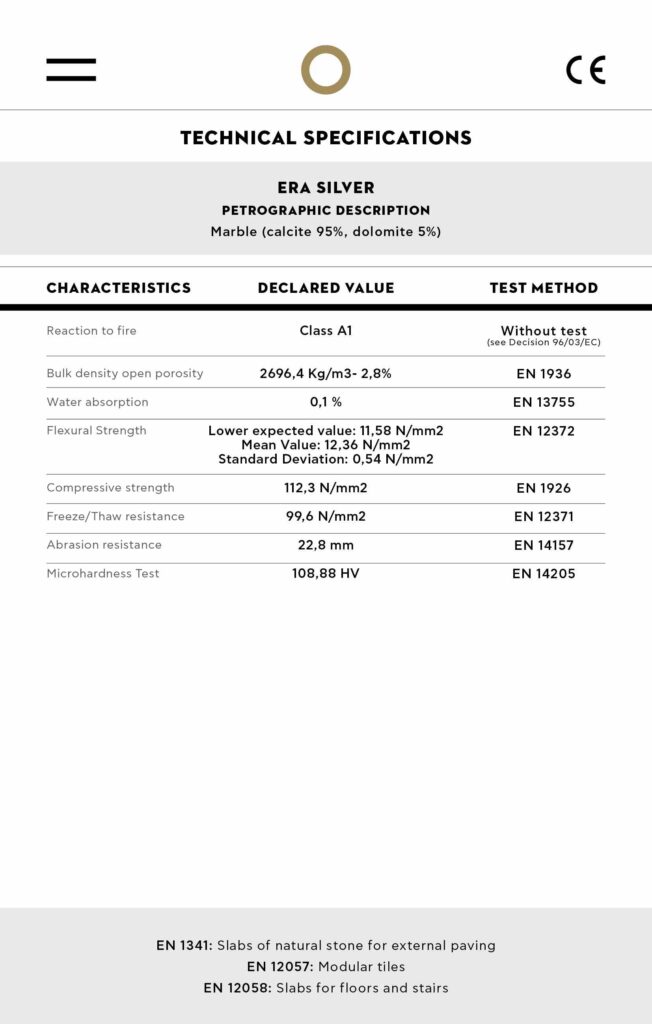 ERA SILVER, Marble, Slabs03 junho 2024
ERA SILVER, Marble, Slabs03 junho 2024 -
 Effects of the thickness of cross-laminated timber (CLT) panels made from Irish Sitka spruce on mechanical performance in bending and shear - ScienceDirect03 junho 2024
Effects of the thickness of cross-laminated timber (CLT) panels made from Irish Sitka spruce on mechanical performance in bending and shear - ScienceDirect03 junho 2024 -
Shandong Laboratory Metal Co.,Ltd - Mechanical properties of #Steel 25CrMo4(1.7218) 🏗Tensile Strength:min 740 N/mm2 🏗Yield Strength:min. 590 N/mm2 🏗Elongation:min.15 %(l) 🏗Kv-Imapct value:min.80J (l)03 junho 2024

você pode gostar
-
The 4 best Evolutions Cards you need to do ASAP in EA FC 24, These be03 junho 2024
-
Baianinho de MAUÁ - Cobrinha me ganhou pegando partido, agora ele03 junho 2024
-
 Mortal Kombat Player Disqualified From Tournament For Criticizing Developers03 junho 2024
Mortal Kombat Player Disqualified From Tournament For Criticizing Developers03 junho 2024 -
 Vestido Infantil de Festa Rosê Luxo Princesa Bebê03 junho 2024
Vestido Infantil de Festa Rosê Luxo Princesa Bebê03 junho 2024 -
Part 6 out of 6 video's for Magic Rampage Chapter 4: Dungeon 9. It03 junho 2024
-
 static./2021/12/devill-king-is-a-par03 junho 2024
static./2021/12/devill-king-is-a-par03 junho 2024 -
fuufu ijou koibito miman dublado episodios|Pesquisa do TikTok03 junho 2024
-
 Meikyuuu Black Company Episódio 5 Data de lançamento03 junho 2024
Meikyuuu Black Company Episódio 5 Data de lançamento03 junho 2024 -
 Pin on Bolos03 junho 2024
Pin on Bolos03 junho 2024 -
Cardiff City FC Premier League Kicks03 junho 2024




